Isaac Sim 和 Isaac Lab 现已推出早期开发者预览版,加速AI仿真技术发展
NVIDIA 发布了机器人仿真参考应用 Isaac Sim 和机器人学习框架 Isaac Lab 的开发者预览版。开发者现在可以通过 GitHub 访问早期版本,抢先体验先进功能,用于在基于物理的仿真环境中构建、训练和测试 AI 驱动的机器人。
Isaac Sim 的更新

图 1. Isaac Sim 中对带叉车的工厂场景的仿真
Isaac Sim 是基于 NVIDIA Omniverse 构建的参考应用,使开发者能够在基于物理的仿真环境中开发、仿真和测试 AI 驱动的机器人。Isaac Sim 5.0 的主要更新包括以下:
开源可用性
Isaac Sim 专用的扩展程序正在一个新的公共 Github 库中开源,这将允许开发者构建和运行 Isaac Sim。此资源库将作为社区的早期访问版,通过公共开发分支提供新功能的访问权限。但是,Omniverse Kit 的组件仍是非开源的,目前不接受外部贡献。
此公共开发分支将通过修复错误不断更新。当所有组件通过 NVIDIA 的质量保证标准后,将为官方 5.0 版本提供二进制发布版本。
先进的合成数据生成流程
Isaac Sim 引入了几个新的扩展程序,进一步扩展了合成数据生成能力,以用于训练、测试和验证 AI 驱动的机器人。
新的机器人模型
Isaac Sim 5.0 引入新的机器人模型和导入工具,使仿真设置更快、更一致,并更接近真实世界行为。
改进的传感器仿真
Isaac Sim 在传感器仿真方面取得了重大进步,使定义和测试传感器模型变得比以往更容易,具有更高的真实感和可控性。
标准化的 ROS 2 接口和 ZMQ 桥接器
Isaac Sim 5.0 全面支持 ROS 2 Jazzy Jalisco,兼容标准化的 ROS 2 仿真接口,以及用于运动规划工作流的更新版 MoveIt 2 教程。此外,新的 ZeroMQ 桥接器便于 Isaac Sim 与外部系统之间的通信,还可以作为开发自定义中间件桥接器的参考示例。
Isaac Lab 的更新

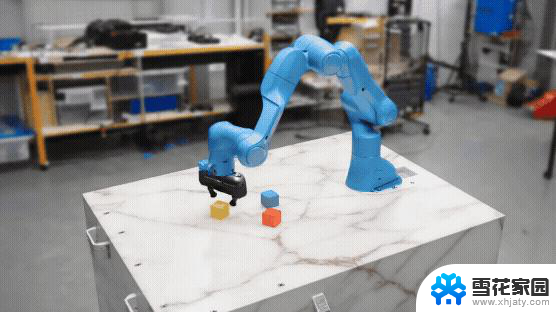
图 2. Isaac GR00T N1 部署在 Isaac Lab 中的傅利叶 GR1 人形机器人上,用于双手操作任务
Isaac Lab 是专为训练和评估机器人学习策略而构建的开源框架。Isaac Lab 2.2 的更新支持以下功能:
开始开发
从 Github 下载源代码,即可开始使用 Isaac Sim 5.0 和 Isaac Lab 2.2 的早期开发版。
https://github.com/isaac-sim/IsaacSimZMQ
https://github.com/isaac-sim/IsaacLab
更多信息,请阅读:NVIDIA Isaac Sim 与 NVIDIA Isaac Lab 将新增先进传感器物理特性、自定义和模型基准测试功能
开始使用 NVIDIA Isaac 库和 AI 模型来开发物理 AI 系统:
https://developer.nvidia.cn/isaac/lab